
Context
The project was developed with two other teams responsible for complementary perception and hardware work. The software group had a limited budget and needed to migrate substantial work from ROS 1 to ROS 2 as project requirements changed.
Architecture
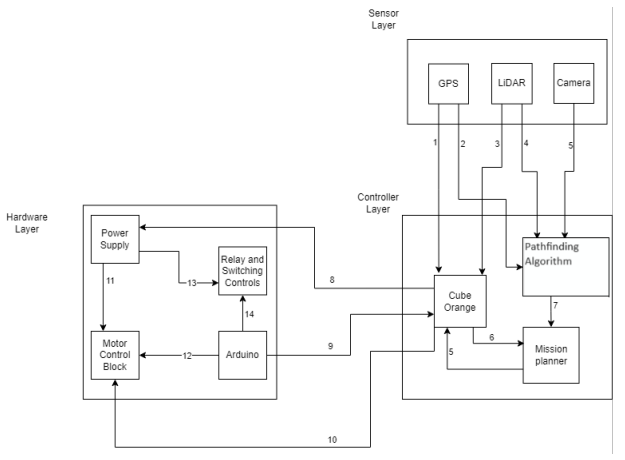
The vehicle architecture was organized into sensor, controller, and hardware layers. GPS, LiDAR, camera, ROS 2, Nav2, Gazebo, ArduPilot, Cube Orange, and Arduino-based electronics were coordinated to support autonomous traversal and motor control.
Contribution
I led the path-planning track, helped integrate electronics, and maintained simulation and vehicle-control work so the platform could progress toward IGVC-style navigation goals.