
Context
The rover was developed across increasingly complex autonomy tasks that validated GPS navigation, wheel-encoder odometry, range sensing, and waypoint generation under practical compute and integration constraints.
System approach
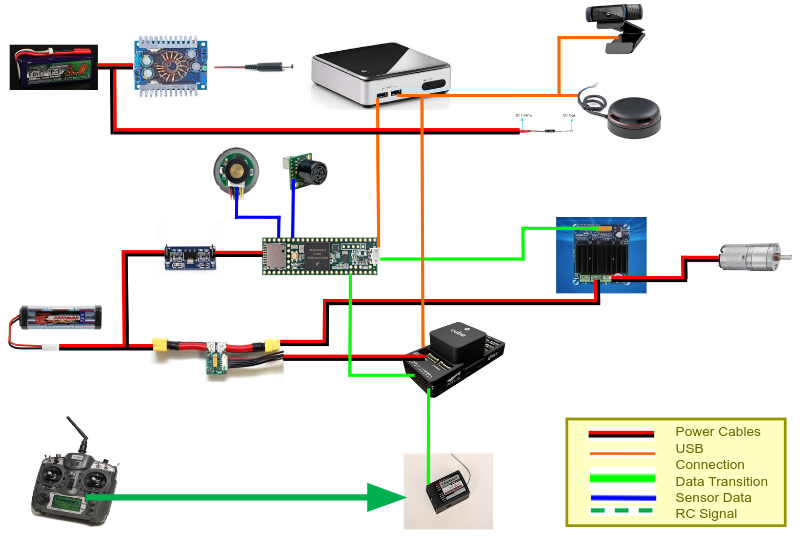
The system combined a LiPo-powered electronics stack, mini-PC, microcontroller, GPS, camera, motor drivers, and manual-override path. Sensors were enabled or removed depending on each task requirement to keep the platform reliable on constrained hardware.
What I contributed
I coordinated the team, integrated sensors and control software, and helped choose practical autonomy strategies such as temporarily disabling nonessential ROS tasks when compute limits affected waypoint-following reliability.